
面试基础知识(4)—— Arm汇编语言
ARM32寄存器
ARM32寄存器的特点?
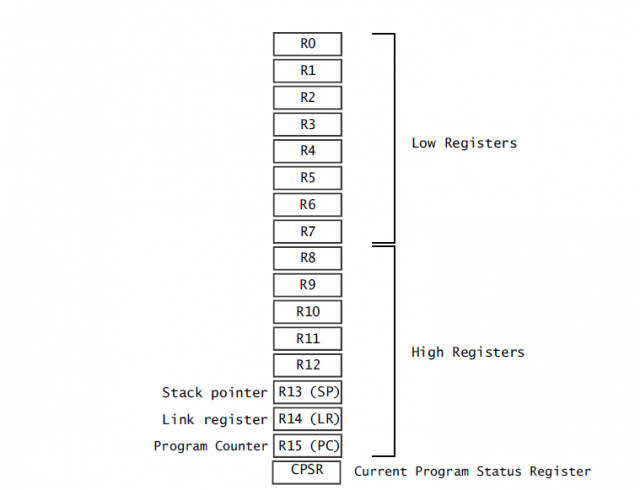
32位arm的R0 - R7为低端寄存器(Thumb16模式下,只能使用R0-R7,R13,R14,R15这几个寄存器),这在所有ARM的工作模式下是共享的
参数寄存器:(R0-R3)
R0寄存器: 通常用于函数传参(参数1)或者普通寄存器或者函数返回值。
R1寄存器: 通常用于函数传参(参数2)或者普通寄存器。
R2寄存器: 通常用于函数传参(参数3)或者普通寄存器。
R3寄存器: 通常用于函数传参(参数4)或者普通寄存器。
特殊寄存器:
R7寄存器: 系统调用时,存放系统调用号,有时也用于作为FP使用。FP又叫frame pointer即栈基指针,主要在函数中保存当前函数的栈起始位置,用于堆栈回溯;
R13寄存器:R13又名SP,即栈指针寄存器,主要用于指向当前程序栈顶,配合指令pop/push等。栈主要用于存放局部变量,保存函数间调用的关键寄存器;
R14寄存器:R14又名LR,即链接寄存器,主要用于存放函数的返回地址,即当前函数返回时,知道自己该回到哪儿去继续运行,通常这个是和BL/BLX/CALL指令搭配;
R15寄存器:R15又名PC,即程序寄存器,主要用于存放CPU取指的地址,记住是取指地址,不是当前运行地址;
Arm32函数调用约定原理以及怎么判断参数个数?
函数调用约定:
arm32位调用约定采用ATPCS,参数1~参数4 分别保存到 R0~R3 寄存器中 ,剩下的参数从右往左一次入栈,被调用者实现栈平衡,返回值存放在 R0 中。第5个参数需要通过sp + 4 访问,第n个参数需要通过sp + 4*(n-4)访问
函数的传参和返回:
arm32函数调用参数传递顺序是从r0~r3,第一个参数在r0中,第二个参数在r1中,依次类推。参数超过4个,则要先入栈,从第五个参数开始从栈中取。 程序返回值如果是32位 则用R0进行返回,为64位时则R0返回低位, R1返回高位
函数的参数个数判断:
例如 Arm32 我们需要看blx后面的值,是不是寄存器,若是,判断小不小于4,若小于,则参数个数即是
BLX Rn n<4 则参数个数为0-n
若n>4 比如 BLX R12 首先我们可以确定一定有4个参数 R0-R3 然后我们需要观察上面STR指令并结合伪代码函数参数个数,来确定,一般多余的参数会使用STR来存入堆栈
Arm32和Thumb的区别?
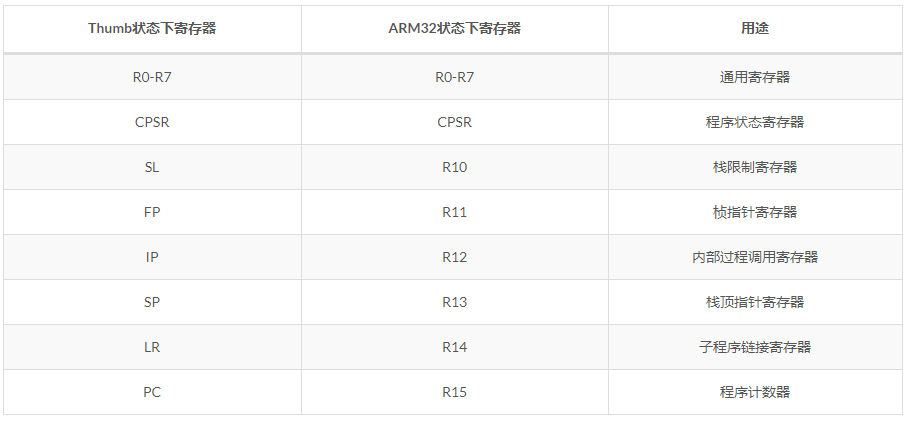
32位下有两种模式arm模式和Thumb模式
A32模式(ARM instruction sets),指令固定的编码长度为32bit;
T32模式(Thumb instruction sets),指令可以编码成16bit长,也可编码成32bit长;
Arm32与Thumb的切换:
ARM32指令集与Thumb指令集切换方法,是在BX和BLX指令跳转时,判断目标地址最低位是否为1
如果为1,跳转时将CPSR寄存器标志T置位,并将目标地址处的代码解释位Thumb代码,处理器切换到Thumb状态;
如果为0,跳转时将CPSR寄存器标志T复位,并将目标地址处的代码解释位ARM32代码,处理器切换到ARM32状态。
Arm32与Thumb的区别:
(1)条件执行:ARM状态下的所有指令都支持条件执行。某些ARM处理器版本允许使用IT指令在Thumb中进行条件执行。条件执行提高了代码密度,因为它减少了要执行的指令数量,并节省了昂贵的分支指令。
(2)32位ARM和Thumb指令:32位Thumb指令具有.w后缀。
(3)桶形移位器是另一种ARM模式特有的功能。它可以将多个指令合并成一个。例如,您可以通过使用如下指令(将移位包含在MOV指令内)左移1位“Mov R1,R0,LSL#1; R1 = R0 * 2”从而代替两个乘法指令(只用乘法指令将寄存器的值乘以2,并使用MOV将结果存储到另一个寄存器中)。
要切换处理器的执行状态,必须满足以下两个条件之一:
(4)我们可以使用分支指令BX(分支和状态切换)或BLX(分支,返回和状态切换),并将目标寄存器的最低有效位置1。这可以通过将1添加到偏移量(如0x5530+1)来实现。你可能会认为这会导致对齐问题,因为指令总是2或4字节对齐的。然而,这么做不会导致问题,因为处理器在读取指令时是忽略最低有效位的。更多的细节将在第6篇:条件分支中介绍。
(5)如果当前程序状态寄存器中的T位置1,我们知道我们处于Thumb模式
ARM64寄存器
ARM64寄存器的特点?
| 寄存器名称 | 用途 |
|---|---|
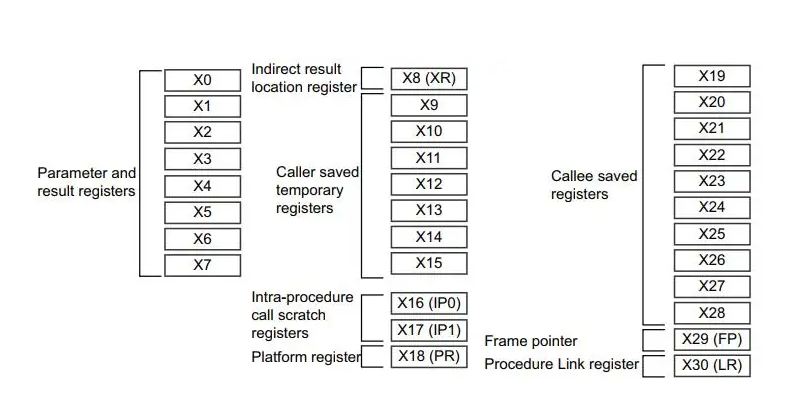
| x0~x7 | 用于传递子程序的参数,使用时不需要保存,多余参数保存在调用者栈中,通过栈传递给被调用函数。其中x0寄存器还可以作为返回值寄存器使用。 |
| x8 | 间接结果寄存器,使用时不需要保存,一般用于传递间接结果的地址,比如函数返回一个大的结构体,x8保存结构体地址。 |
| x9~x15 | 临时寄存器,子程序使用时不需要保存。 |
| x16~x17 | 又名IP0、IP1,内部过程调用寄存器,常用于动态链接中的plt寻址等指令。 |
| x18 | 平台预留寄存器,在不同的操作系统使用不一样。 |
| x19~x28 | 临时寄存器,子程序使用时必须保存。 |
| x29 | 帧指针寄存器(FP),用于连接栈帧,使用时必须保存。 |
| x30 | 链接寄存器(LR),用于保存子程序的返回地址。 |
在ARM64下,PC的值只能间接读取或改变——
(1)64位可读取PC值的情况有:计算相对地址,如adr,adrp,文字池加载以及直接分支;子程序返回地址,比如bl,blr
(2)可修改pc的方式为:使用控制流指令,如条件跳转、无条件跳转、异常生成和异常返回指令
Arm64函数调用约定原理以及怎么判断参数个数?
函数调用约定:
arm64位调用约定采用AAPCS64。参数1~参数8 分别保存到 X0~X7 寄存器中 ,剩下的参数从右往左一次入栈,被调用者实现栈平衡,返回值存放在 X0 中。(第8个参数需要通过sp访问,第9个参数需要通过sp + 8 访问,第n个参数需要通过sp + 8*(n-8)访问)。
函数的传参和返回:
arm64函数调用参数传递顺序是X0~X7:用于函数入参,最多支持8个函数入参,多余采用入栈方式,X0:用于返回函数结果。
函数的参数个数判断:
同上
ARM32汇编指令
寻址指令:
立即寻址:MOV R0,#123 R0=123
寄存器寻址:MOV R0,R1 R0=R1
寄存器移位寻址:MOV R0,R1,LSL #2 R0=R1*4
寄存器间接寻址:LDR R0,[R1] 将R1寄存器中的值作为地址,取出地址中的值赋予R0
寄存器间接基址偏移寻址:LDR R0,[R1,#-4]将R1寄存器的值-0x4的值作为地址,取出地址中的值给R0
比较指令:
CMP:比较
CMP R0 #0 R0寄存器中的值与0比较
标志位:如z位,这个都可以在动态调试时,寄存器窗口看到
逻辑运算指令:
与:AND
或:ORR
异或:EOR
移位:实质是乘,除,类似于小数点移位,但相反。小数点左移,数变小;右移变大。
但逻辑移位,左移变大,右移变小,且按2的倍数进行,因为是2进制。
LSL:逻辑左移←
LSR:逻辑右移←
算数运算指令:
ADD,SUB,MUL,DIV 有符号,无符号运算;带进位运算
寄存器交互指令:
LDR与STR
LDR:从存储器中加载数据到寄存器 ← Load
LDR R8,[R9,#4] R8为待加载数据的寄存器,加载值为R9+0x4所指向的存储单元 R8=[R9+4]
STR:将寄存器的数据存储到存储器 → Store
STR R8,[R9,#4] 将R8寄存器的数据存储到R9+0x4指向的存储单元
LDM与STM
LDM:将存储器的数据加载到一个寄存器列表 →
LDM R0,{R1-R3}将R0指向的存储单元的数据依次加载到R1,R2,R3寄存器
STM:将一个寄存器列表的数据存储到指定的存储器 ←
PUSH与POP
PUSH:将寄存器值推入堆栈
POP:将堆栈值推出到寄存器
SWP:将寄存器与存储器之间的数据进行交换
SWP R1, R1 [R0] 将R1寄存器与R0指向的存储单元的内容进行交换
跳转指令:
B 无条件跳转
BL 带链接的无条件跳转
BX 带状态切换的无条件跳转
BLX 带链接和状态切换的无条件跳转
B loc_地址
BEQ,BNE
带L是带连接跳转,带X是带状态的跳转 BLX指令从ARM指令集跳转到指令中所指定的目标地址,并将处理器的工作状态有ARM状态切换到Thumb状态
ARM64汇编指令
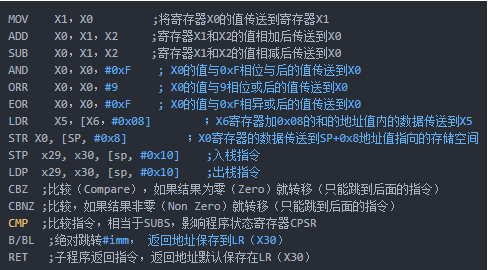
相比于ARM32,ARM32中的LDM、STM、PUSH、POP指令,在ARM64中并不存在。取而代之的是LDP、STP指令。
ARM64栈处理指令:
由于在ARM64下,对于栈的操作都是要16个字节对齐的,所以都是双寄存器读写操作
STP:写入指令,将数据从两个寄存器中读出来, 写入到栈中
LDP:读取指令,将数据从栈中读取出来, 存到两个寄存器中
Arm指令条件?
ARM指令所有指令都是带有条件的,默认是AL即无条件执行,当指令带有默认条件时不需要明确写出。ARM指令包含4位的条件码列表如下:

ARM软中断
Arm32软中断?
在使用软中断进行系统调时,系统调用号通过R7寄存器传递,用SWI指令产生软中断,实现从用户模式到管理模式的切换。例如,调用exit(0)的汇编代码如下:
MOV R0, #0 //参数0
MOv R7, #1 //系统功能号1为 exit
SWI #0 //执行 exit(0)
Arm64软中断?
在使用软中断进行系统调时,系统调用号通过x8寄存器传递,用svc指令产生软中断,实现从用户模式到管理模式的切换。例如:
mov x0, 123 // exit code
mov x8, 93 // sys_exit() is at index 93 in kernel functions table
svc #0 // generate kernel call sys_exit(123);
ARM三级流水线?
ARM处理器使用流水线来增加处理器指令流的速度,这样可使几个操作同时进行,并使处理与存储器系统之间的操作更加流畅,连续
ARM三级流水线分为:
取指:从存储器装载一条指令
译码:识别将要被执行的指令
执行:处理指令并将结果写会寄存器
ARM正在执行第1条指令的同时对第2条指令进行译码,并将第3条指令从存储器中取出,所以,ARM7流水线只有在取第4条指令时,第1条指令才算完成执行。无论处理器处于何种状态,程序计数器R15(PC)总是指向“正在取指”的指令,即下图中的第三条指令。
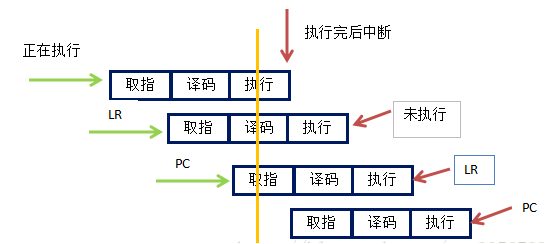
- 在ARM32状态下,当前执行指令的地址通常是pc-8,而在Thumb状态下通常是pc-4。
- 在AARCH64状态下,当前执行指令的地址通常是pc。